
RobustSTL : A Robust Seasonal-Trend Decomposition Algorithm for Long Time Series
Qingsong Wen et al (2018, Alibaba Group)
Implementation : https://github.com/LeeDoYup/RobustSTL
Abstract
- 시계열데이터를 trend, seasonality, and remainder components로 분해하는 것은 어노말리 디텍션이나 예측 모델을 만드는데 중요한 역할을 합니다.
- 기존의 여러가지 성분분해 방식들은
- 1) 주기성이 변하거나 이동하는 것, 트렌드나 나머지성분의 갑작스러운 변화를 잘 처리하지 못하며(seasonality fluctuation and shift, and abrupt change in trend and reminder)
- 2) 어노말리 데이터에 대해서 로버스트하지 못하거나
- 3) 주기가 긴 시계열 데이터에 대해서 적용하기 어려운 문제가 있습니다.
- 본 논문에서는 위와 같은 문제점을 해결할 수 있는 새로운 성분 분해 방식을 제안합니다.
- 먼저 sparse regularization와 least absolute deviation loss를 이용해 트렌드를 뽑고
- Non-local seasonal filter를 사용하여 seasonality 성분을 얻습니다.
- 이 과정을 정확한 디컴포지션을 얻을때까지 반복합니다.
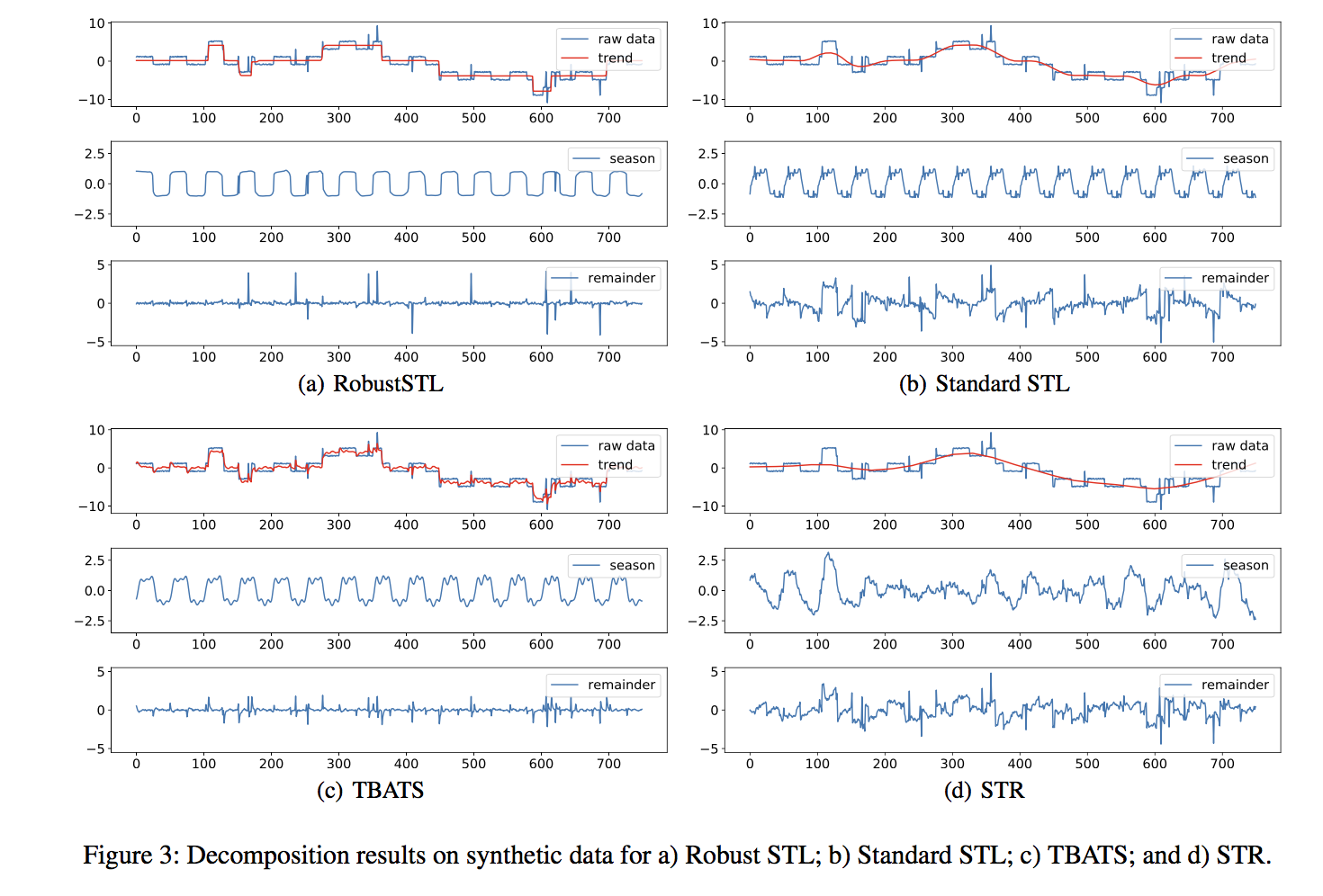
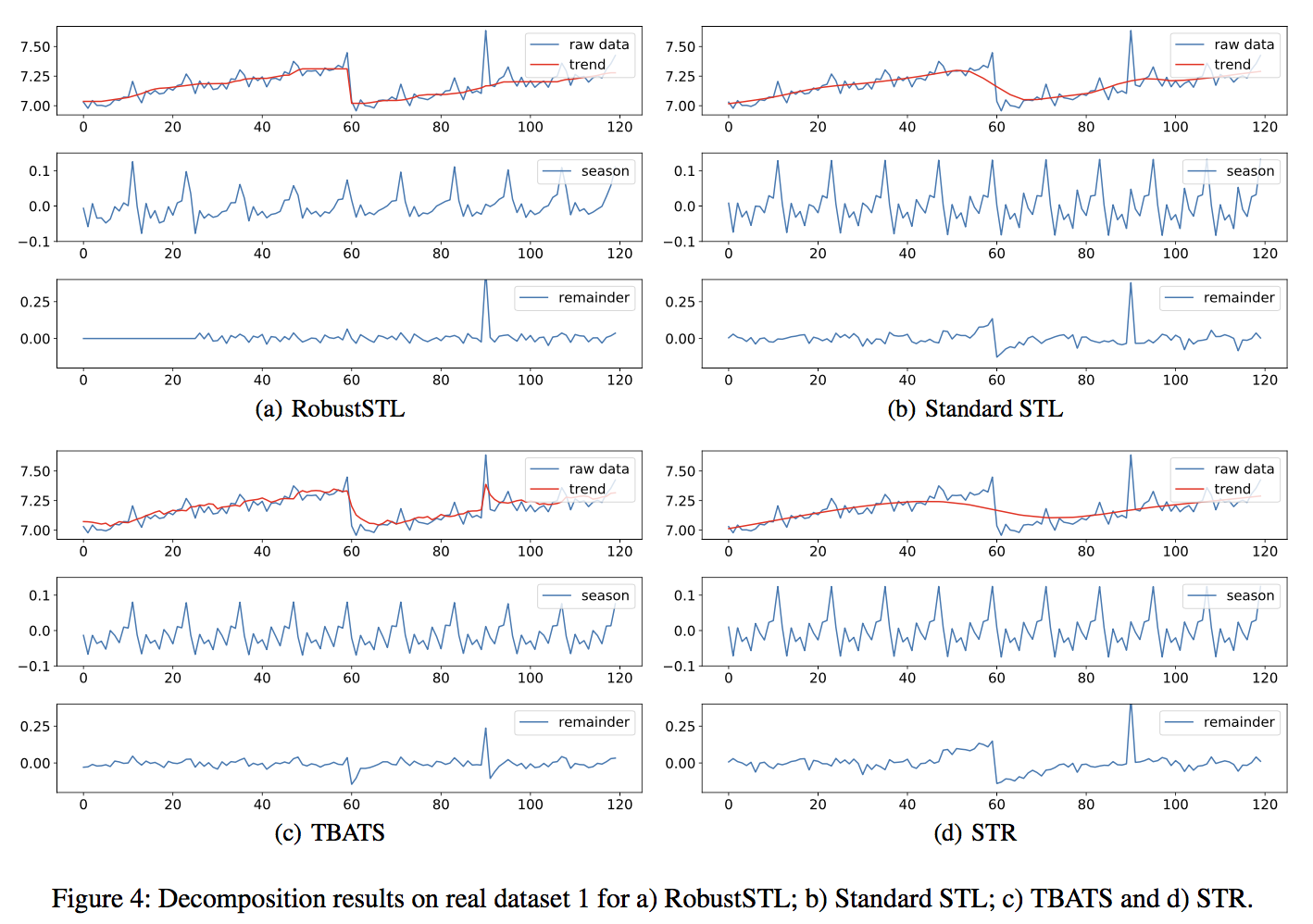
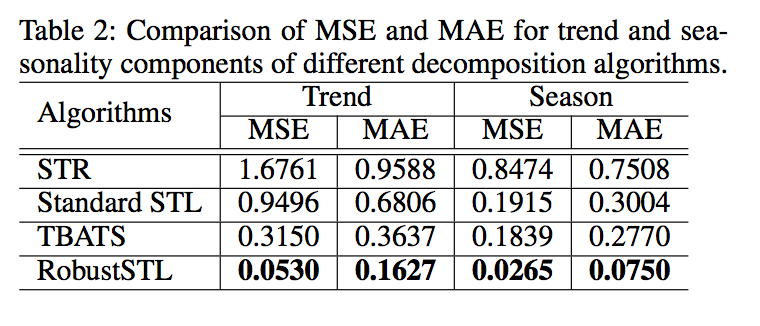
- 실험데이터와 실제 시계열데이터에 대해서 기존 방법들 대비 더 좋은 성능을 보임을 확인하였습니다.
Introduction
- 디컴포지션 방법으로 널리 사용되는 방법은 STL(seasonal trend decomposition using Loess), X-13-ARIMA-SEATS, X-11-ARIMA, X-12-ARIMA 등이 있습니다. 하지만 seasonality shift나 fluctuation이 존재할 경우 정확하지 않거나, 빅데이터에 존재하는 long seasonality에는 적합하지 않습니다.
- seasonality fluctuation and shift - 하루가 주기인 시계열 데이터가 있다고 했을때, 오늘 1시에서의 seasonality component는 어제의 12시 30분에 대응되고, 그제의 1시 30분에 대응될수 있음
- Abrupt change of trend and remainder - local anomaly could be a spike during an idle period (busy day의 높은 값보다는 낮아서 정확히 디텍션하기 어려움
- Long seasonality - 보통은 quarterly or monthly data임. T 주기의 시즈널리티를 찾기 위해서는 T-1개의 데이터가 필요함. 하루 주기에 1분 간격 데이터의 경우 T=1440개고 이와 같은 long seasonality는 기존 방법들로는 풀기어려움
- 이 논문에서 제안한 방법은 Long seasonality period and high noises 더라도 시즈널리티를 비교적 정확하게 디컴포지션할수 있습니다.
Robust STL Decomposition
Model Overview
\[\begin{align} y_t & = \tau_t + s_t + r_t, & t = 1, 2, …, N \\ r_t & = a_t + n_t \\ \end{align}\]where \(a_t\) denotes spike or dip, and \(n_t\) denotes the white noise.
- 시계열 모델은 트렌드(\(\tau_t\)), 시즈널리티(\(s_t\)), 리마인더(\(r_t\))로 구성되어 있고, 리마인더는 스파크 또는 딥과 같은 어노말리(\(a_t\))와 화이트 노이즈(\(n_t\))로 이루어집니다.
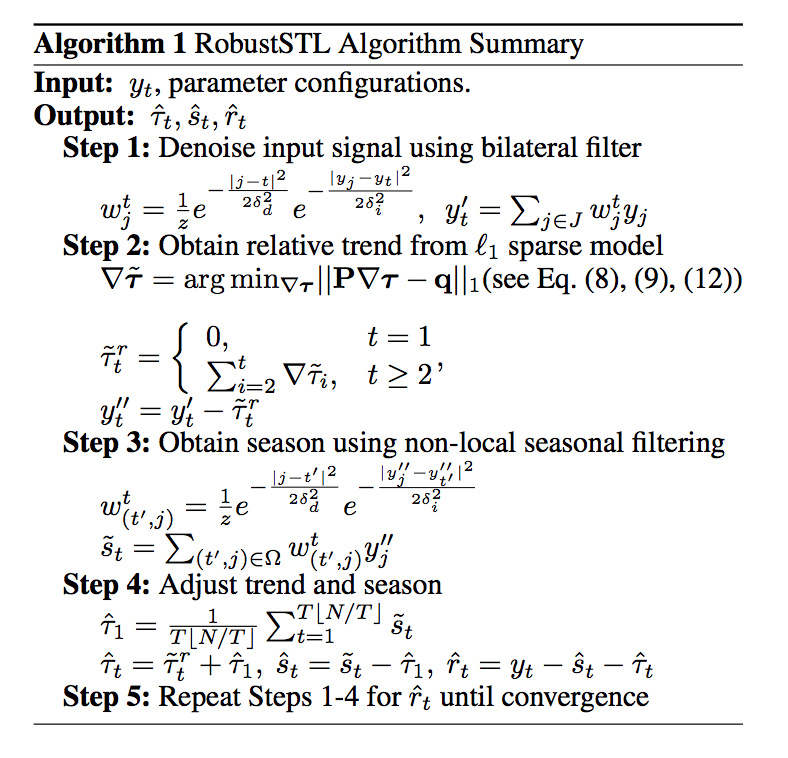
- 제안하는 알고리즘은 크게 4-steps 으로 각 성분을 분해합니다.
- Denoise time series by applying bilateral filtering
- Extract trend robustly by solving a LAD regression with sparse regularization
- Calculate the seasonality component by applying a non-local seasonal filtering to overcome seasonality fluctuation and shift
- Adjust extracted components
Noise Removal
\[\begin{align} y^\prime_t & = \sum_{j \in J} w_j^t y_t, & J = t, t \pm 1, …, t \pm H \\ w_j^t & = \frac{1}{z} e^{-\frac{\left\vert j- t \right\vert ^2}{2\delta_d^2}} e^{-\frac{\left\vert y_j - y_t \right\vert ^2}{2\delta_i^2}} \end{align}\]- J는 필터의 윈도우를 의미하며, 윈도우 사이즈는 2H+1 입니다.
-
필터의 가중치는 두개의 가우시안 함수로 구성됩니다. bilateral filter는 여기를 참고하세요.
- After denoising,
Where the \(\hat{n}_t = y_t - y^\prime_t\) is the filtered noise.
Trend Extraction
- 시즈널 디퍼런스 오퍼레이터는 같은 주기의 값을 차분하는 것으로 아래와 같이 정의할 수 있습니다.
- 마지막 줄의 수식에서 첫번째 항이 \(g_t\)에 가장 많은 기여를 합니다. \(s_t\) and \(r^\prime_t\)에 시즈널 디퍼런스 오퍼레이터를 적용하면 값이 매우 작아진다고 가정하기 때문입니다.
- \(g_t\)에서 트렌드의 first order differece(\(\nabla \tau_t\))를 구하기 위해서 다음과 같은 최적화 식을 사용합니다.
- 첫번째 항은 LAD를 사용한 emprical error를 의미합니다. sum-of-squares 보다 아웃라이어에 대해서 더 로버스트하기 때문에 LAD를 사용하였습니다.
- 두번째와 세번째 항은 각 각 트렌드에 대한 first-order 와 second-order difference operator 입니다.
- 두번째 항은 트렌드 디퍼런스 \(\nabla \tau_t\) 가 천천히 변화하지만 종종 갑작스러운 레벨 쉬프트(abrupt level shift)가 있다는 것을 의미합니다.
-
세번째 항은 트렌드가 smooth하고 piecewise linear such that \(\nabla^2 x_t = \nabla(\nabla x_t)) = x_t -2 x_{t-1} + x_{t-2}\) are sparse
- 이를 매트릭스 형태로 표현하면 다음과 같습니다.
where the matrix P and vector q are
\[P = \begin{bmatrix} M_{(N-T) \times (N-1)} \\ \lambda_1 I_{(N-1) \times (N-1)} \\ \lambda_2 D_{(N-2) \times (N-1)} \\ \end{bmatrix}, q = \begin{bmatrix} g_{(N-T) \times 1} \\ 0_{(2N-3) \times 1} \\ \end{bmatrix}\]M and D are Toeplitz matrix (refer to the paper for details)
- 위의 최적화식을 통해서 \(\tau_1\)에 대한 상대적인 트렌드(relative trend, \(\tilde{\tau}_t^r\))를 구할수 있습니다.
- 그리고 나서, 디컴포지션 모델은 아래와 같이 업데이트 됩니다. \(y_t'' = y_t' - \tilde{\tau}_t^r = s_t + \tau_1 + r_t'' \\ r_t’’ = a_t + (n_t - \hat{n}_t) + (\tau_t - \tilde{\tau}_t)\)
Seasonality Extraction
- relative trend component를 분리한 후에는, \(y’’_t\)는 시즈널리티로 오염되어 있다고 생각할 수 있습니다.
-
기존의 시즈널리티 분해 방법들은 주기가 \(T\)인 \(s_t\)’를 구하기 위해서는 K개의 연속적인 값 \(y_{t-KT}, y_{t-(K-1)T}, …, y_{t-T}\) 만 고려하였습니다. 하지만, 이 방식은 시즈널리 쉬프트 현상을 설명할수 없다는 단점이 있습니다.
- 여기서는 \(y’’_{t-KT}\)를 중심으로 인접한 값들을 고려합니다. \(y’’_{t-KT}\)를 계산할때는 그 값을 중심으로 2H+1개의 인접값들 \(y’’_{t-KT-H}, y’’_{t-KT-H+1}, …, y’’_{t-KT}, y’’_{t-KT+1}…, y’’_{t-KT+H}\)를 사용합니다.
- 시즈널 컴포넌트 \(s_t\) 는 아래와 같이 of \(y’’_t\)의 가중합으로 표현됩니다.
Where the \(w^t_{(t’,j’)}\) and \(\Omega\) are defined as
\[w^t_{(t’,j’)} = \frac{1}{z}e^{-\frac{\left\vert j- t \right\vert ^2}{2\delta_d^2}} e^{-\frac{\left\vert y’’_j - y’’_{t’} \right\vert ^2}{2\delta_i^2}} \\ \Omega = \{(t’,j) \vert (t’=t-k \times T, j= t’ \pm h )\} \\ k=1, 2, …, K; \ h=0, 1, …, H\]- 시즈널티리를 분리한 후에는, 리마이더 시그널은 아래와 같이 표현됩니다. \(r’’’_t = y’’_t - \tilde{s}_t = a_t + (n_t - \hat{n}_t) + (\tau_t - \tilde{\tau}_t) + (s_t - \tilde{s}_t)\)
Final Adjustment
- 시즈널리티 컴포넌트의 합계는 0으로 조정되어야합니다.
- 따라서 평균값(트렌드 \(\tau_1\)에 대응되는 값)을 빼줌으로서 시즈널리트를 조정합니다.
- 리마인더 시그널 \(\hat{r}_t\) 가 수렴할 때까지 위 과정을 반복합니다.
Experiments
Comments