
Deep Spatio-Temporal Residual Networks for Citywide Crowd Flows Prediction
Junbo Zhang, Yu Zheng, Dekang Qi (Microsoft Research) 2017
Keras implementation : https://github.com/lucktroy/DeepST
Introduction
- Forecating the flow of crowds
-
In this paper, we predict two types fo crowd flows : inflow and outflow
- Inflow and outflow of crowds are affected by the following
- Spatial dependencies
- Temporal dependencies
- External influence : such as weather, events
- Contributions
- ST-ResNet employs convolution-based residual networks to model nearby and distance spatial dependencies between any two regions
- three categories of temporal properties : temporal closeness, period, and trend. ST-ResNet use three residual netowrks to model these, respectively
- ST-ResNet dynamically aggregates the output of the three aforementioned networks.
Formulation of Crowd Flows Problem
- Region : we partition a city into an I*J grid map
- Inflow/outflow : Let P be a collection of trajectories at the tth time interval. For a grid (i, j) that lies at the ith row and jth column, the inflow and outflow of the crowds at the tiem interval t are defined respectively as
\(x_t^{in, i, j} = \sum_{T_r \in P} |{k > 1 |g_{k-1} \notin (i, j) \land g_k \in (i, j)}| \\
x_t^{out, i, j} = \sum_{T_r \in P} |{k \ge 1 |g_{k-1} \in (i, j) \land g_{k+1} \notin (i, j)}|\)
where
- \(T_r : g_1 \to g_2 \to ... \to g_{\left\vert T_r \right\vert}\) is a trajectory in P
- \(g_k\) is the geospatial coordinate
- \(g_k \in (i, j)\) means the point \(g_k\) lies within grid (i, j), and vice versa
- \(\left\vert \cdot \right\vert\) denotes the cardinality of a set
Deep Spatio-Temporal Residual Networks
-
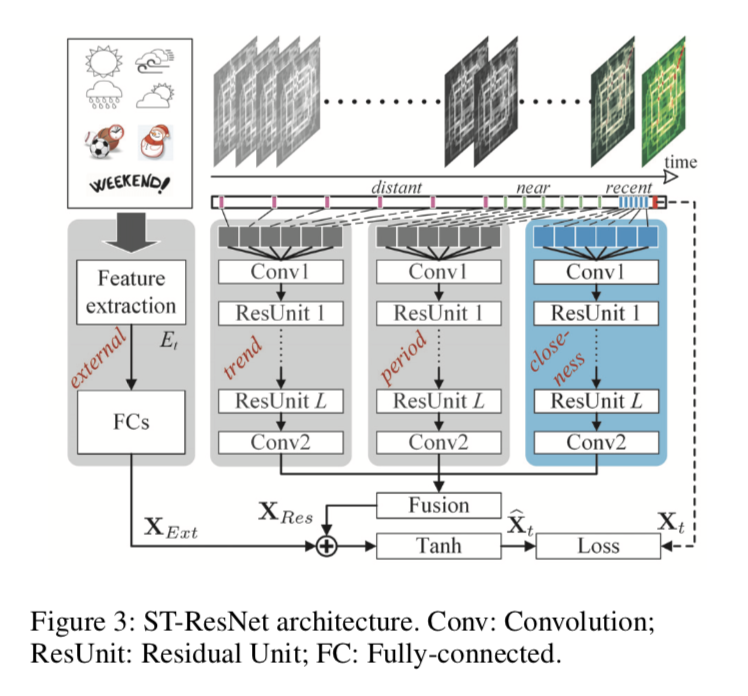
comprised of four major components modeling temporal closeness, period, trend, and external influence, respectively.
-
First, we turn inflow and outflow throughout a city at each time interval into a 2-channel image-like matrix.
- Then, we divide the time axis into three fragments, denoting recent time, near history and distant history. The 2-channel flow matrics of intervals in each time fragment are the fed into the first three components seperately to model the aforementioned three temporal properties: closeness, period, and trend
- three components share the same network structure(Regisudal Unit sequence)
- The output of the three components are fused as \(X_{Res}\) based on parameter metrics, which assign different weights to the results of different components in different regions.
-
In the external component, we manually extract some feature form external datasets, such as weather conditions and events, feeding them into a two-layer fully-connected neural network.
- \(X_{Res}\) and \(X_{Ext}\) are integrated together. Then, the final output is mapped into [-1, 1] using Tanh function.
Structures of the First Three Components
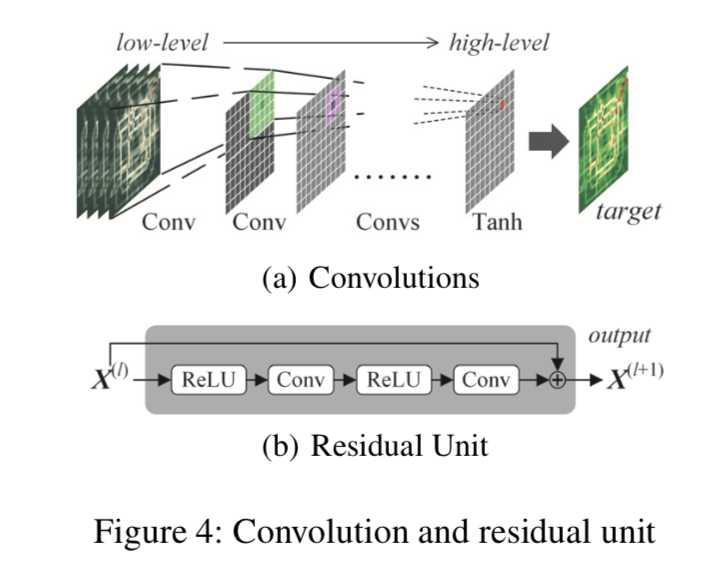
- Do not user subsampling, but only convolutions
- closeness component
- \([X_{t-l_c}, X_{t-l_c-1}, ..., X_{t-1}]\) : concatnate them along with the first axis
- \(X_c^{(0)} \in R^{2l_c \times I \times J}\) is followed by
conv1 Residual Unit: stack \(L\) residual units to capture very large citywide dependenciesResidual Unitcombinations fo “ReLu + Convolution” and “BatchNormalization” is added before ReLu.- On top of the \(L^{th}\) residual unit, we append a convolutional layer
conv2 - output of the closeness componet is \(X_c^{(L+2)}\)
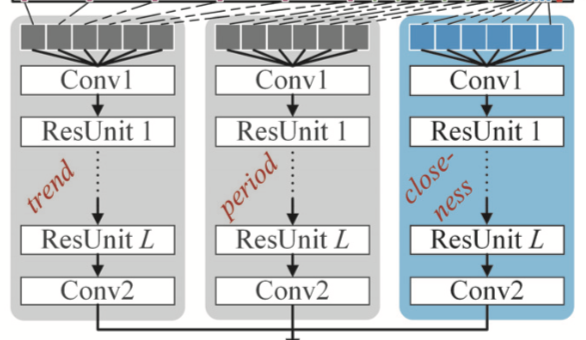
- period component
- Assume that there are \(l_p\) time intervals from the period fragment and the period is \(p\) ;\([X_{t-l_p \cdot p}, X_{t-(l_p-1) \cdot p}, ..., X_{t-p}]\)
- output : \(X_p^{(L+2)}\)
- in implementation, p is equal to one-day (daily periodicity)
- trend component
- \(l_q\) is the length of the trend dependent sequence and q is the trend span
- input : \([X_{t-l_q \cdot q}, X_{t-(l_q-1) \cdot q}, ..., X_{t-q}]\)
- output : \(X_q^{(L+2)}\)
- in implementation, q is equal to one-week(week trend)
The Structure of the External Component
-
mainly consider weather, holiday event, and metadata(DayOfWeek, Weekday/Weekend)
-
stack two fully-connected layers upon \(E_t\)
- first layer : embedding layer
- second layer : to map low to high dimensions that have the same shape with \(X_t\)
Fusion
- flows of two regions are all affected by closeness, period, and trend, but the degrees of influence may be very different ; parametric-matrix-based fusion
- \(\circ\) is Hadamard product (i.e., element-wise multiplication)
-
\(W_c, W_p, W_q\) are learnable parameters
- fusing the external component
- objectives : minimizing mean squared error between the predicted flow matrix and the true flow matrix.
Experiments
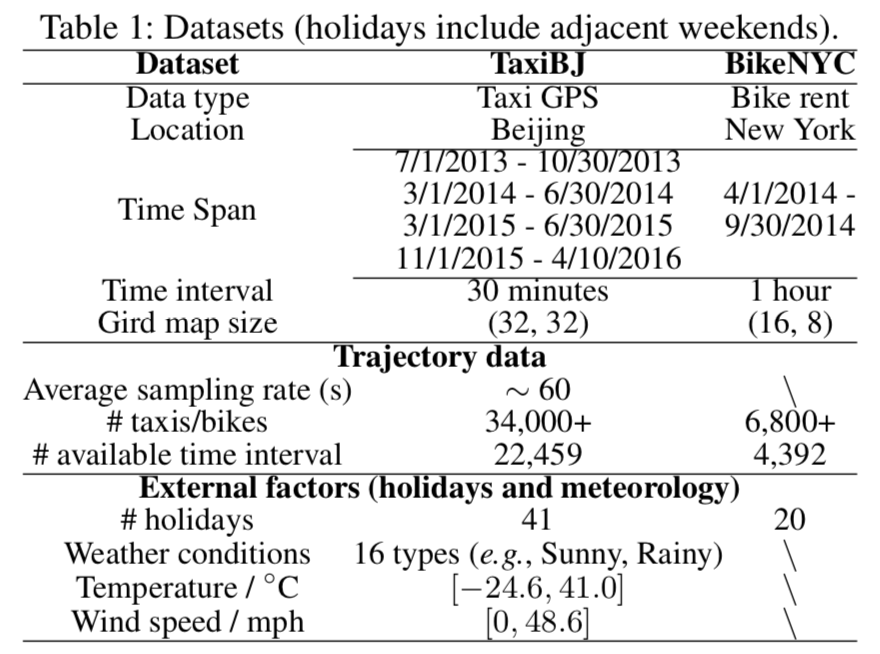
- Datasets
- Baselines
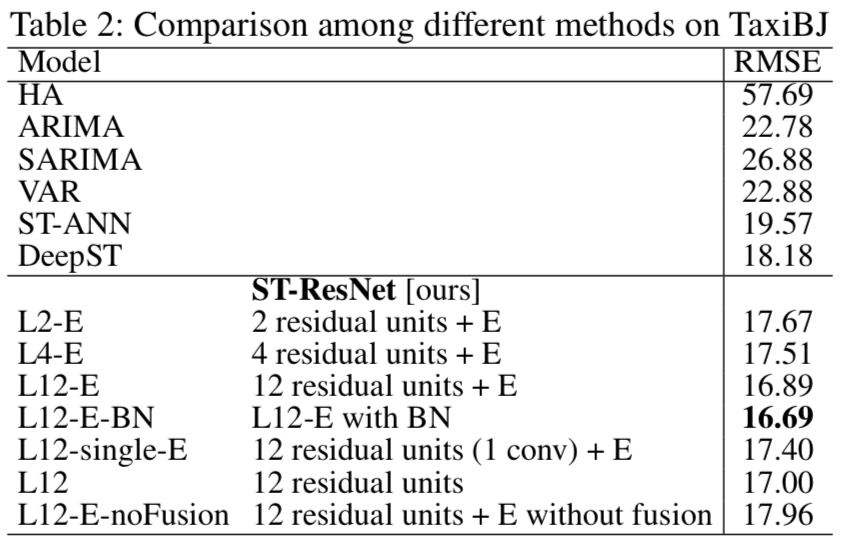
- HA : historical data (previous week, same time)
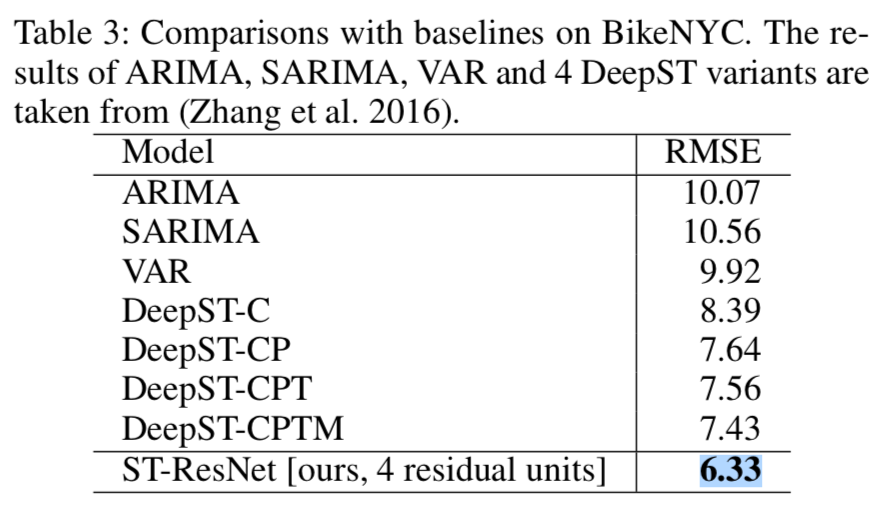
- ARIMA, SARIMA, VAR
- ST-ANN : It first extracts spatial (nearby 8 regions’ values) and temporal (8 previous time intervals) features, then fed into an artificial neural network.
- DeepST : (Zhang et al. 2016)
- Preprocessing
- min-max normalization : [-1, 1] (tanh)
- one-hot encoding for external data
- Result
Comments